《Escape Maps: The Phantom》은 디지털 지도 시스템이 인간의 감정과 기억을 어떻게 다루고 있는지 질문한다. 실제 구글 지도 리뷰어들을 섭외해 인터뷰를 진행하고, 다양한 리서치를 통해 지도에서 배제된 정동의 흔적을 수집해 재구성한 공간형 인터랙티브 다큐멘터리이다. 전작 《Escape Maps》(2022)가 ‘지도에 표시되지 않은 데이터·공간’라는 주제를 통해 기술 시스템의 비가시적 경계를 탐색했다면, 이번 작업은 지도 위 공간을 구성하는 주체로서 ‘리뷰어’에 주목한다.
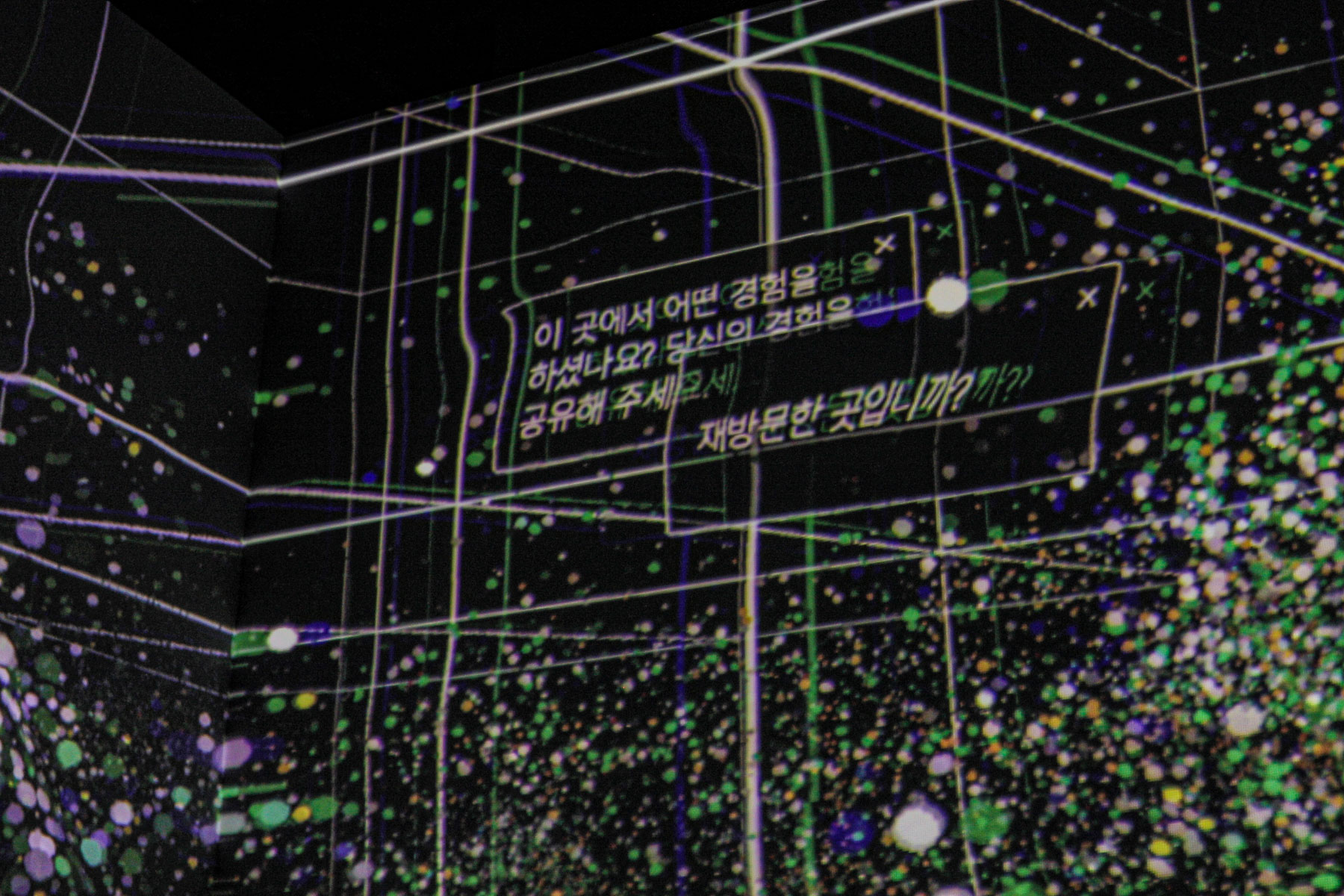
‘지역 가이드’는 ‘적절한’ 정보를 많이 업로드한 유저를 일컫는 명칭이자 배지(Badge), 레벨(Level) 등 사용자의 참여를 점수화하는 게이미피케이션 시스템이다. 유저는 방문한 장소의 사진, 실용적인 정보, 감상 등 개인적인 경험을 공유한다. 하지만 개인의 생동감 있는 경험은 인공지능에 의해 낱말로 쪼개져 데이터화된 후, 적합하지 않다고 판단될 경우, 탈락하게 된다. 이처럼 사용자이면서 동시에 플랫폼에 속한, 이중적인 위치에 놓인 유저들은 플랫폼의 가이드라인에 따라 자신의 경험을 데이터화하는 과정을 거친다. 그 결과 그들의 존재와 경험은 특정할 수 없는 수많은 데이터 중 하나에 불과한, '유령'이 된다.
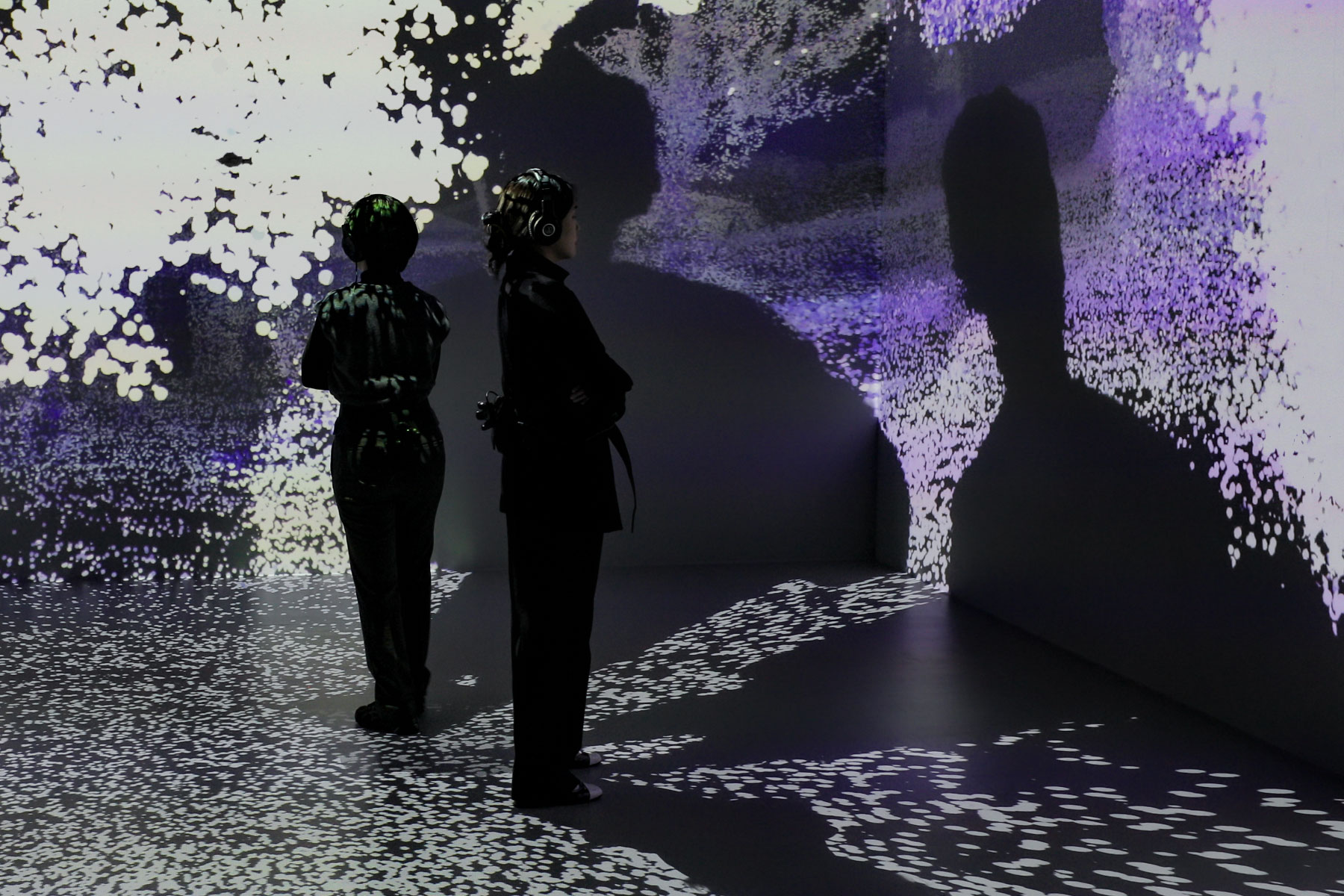
작품은 실제 지역 가이드들의 음성, 손동작, 인터뷰 등 지도에 업로드되지 못한 로우 데이터를 수집하고 재구성해, 기존의 시스템과 다른 감각적 ‘리뷰’ 경험을 구성한다. 관객은 그들의 흔적을 따라가며, 지도 시스템이 받아들이지 못한 정동의 조각들을 새롭게 감각하고 연결하는 역할을 수행한다.
《The Phantom》은 감정적 경험이 플랫폼에 의해 어떻게 자동화되고 선별되는지를 추적하며, 기술이 구축한 '현실'의 기준에 균열을 가한다. 지도에서 삭제된 감각을 복원하고, 배제된 존재의 흔적을 따라 또 다른 서사를 구성하려는, 《Escape Maps》 프로젝트의 확장된 시도이다.
《Escape Maps: The Phantom》questions how digital mapping systems handle human emotions and memories. The project involves interviewing actual Google Maps reviewers and conducting various forms of research to collect and reconstruct traces of affect that are excluded from the map. It is a spatial interactive documentary. While the previous work,《Escape Maps》(2022), explored the invisible boundaries of technological systems through the theme of “data and spaces not shown on the map,” this work focuses on the reviewers as the agents who shape the spaces that appear on the map.
The term “Local Guide” refers to users who upload a large volume of so-called “appropriate” information. It is also the name of a gamified system that scores participation through badges, levels, and rankings. Users share personal experiences—photographs, practical tips, and reflections—about places they’ve visited. However, these vivid personal experiences are broken down into words by artificial intelligence filter and converted into data. If deemed inappropriate or irrelevant, they are excluded.
In this way, users occupy a dual position: they are both participants and subjects of the platform, translating their own experiences into data according to platform guidelines. As a result, their presence becomes indistinguishable—just one among countless fragments of data—a kind of “phantom.”
The work collects and reconstructs raw data that never made it onto the map—reviewers’ voices, hand gestures, and interview fragments—to compose a new, sensorial mode of “reviewing” that departs from the norms of existing systems. Audiences trace these ghostly remnants, re-sensing and re-connecting fragments of affect that were discarded or rendered illegible by digital cartographies.
《Escape Maps: The Phantom》tracks how emotional experience is automated and filtered by platforms, and in doing so, introduces a rupture in the normative “reality” constructed by technology. It is an expanded continuation of the Escape Maps (2022) project —an attempt to restore erased sensations and follow the traces of excluded presences toward new narrative possibilities.
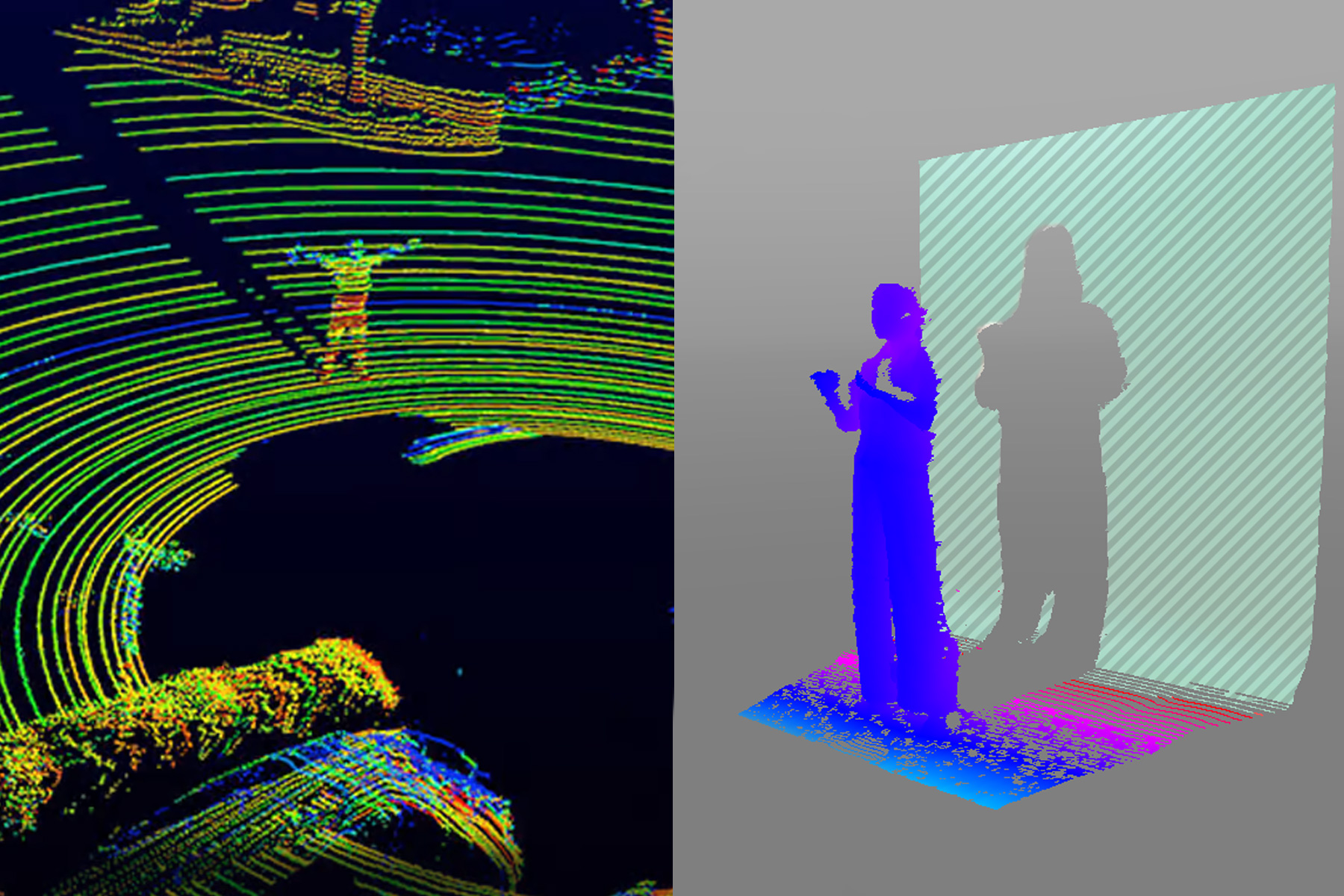
Image(Right): An optical image of the resolution by the Velodyne LiDAR VLS-128 in operation. Velodyne LiDAR
Image(Left):Silhouette data from the interviewee taken by the depth camera. No data was left on the wall covered by the interviewee.
작품은 실제 산업 현장에서 활용되는 3D 스캔 기술의 원리를 오용하여 작업의 연출로 드러낸다. 3D 스캔으로 데이터화 되는 풍경 앞에 장애물이 위치하면 해당 부분은 데이터 손실이 발생하게 되고, 데이터가 없는 부분은 마치 그림자처럼 보이게 된다. 작품은 이 이미지를 적극 활용하여, 디지털 지도의 리뷰어들을 손실된 데이터로 표현하였다.
The work deliberately misuses the principles of 3D scanning technology—commonly employed in industrial fields—as a means of artistic composition. When an obstacle is positioned in front of a landscape being scanned, that area results in data loss, leaving gaps that appear visually as shadows or voids. The work harnesses this visual artifact to represent the reviewers of digital maps as lost or missing data—figures rendered invisible within the technological system.
전시에서는 인터뷰 전문과 리서치 과정의 내용들을 담은 애플리케이션을 함께 감상할 수 있도록 배치했다.
As part of the exhibition, a mobile application was made available, allowing viewers to explore full interview transcripts and materials from the research process.
Credit
Sound Design : Yihwan Lim
Sound Engineering : Sewoon An
Spatial Design: Jeong Yoon Ji